SPLAY树(伸展树)
1985年美国学者Daniel Sleator和Robert Tarjan提出Splay树,其能保证运算的摊还代价是\(O(\lg{n})\),但不保证每次运算的实际代价都是\(O(\lg{n})\),所以其并非严格意义上的自平衡二叉树,但这也使其有更简单的定义和运算步骤。这里直接给出Splay树的定义,首先其运算功能和前文的BST一致,且运算开始前只需保证二叉树是BST,但运算步骤是被具体规定的,它们都必须基于伸展运算\(splay(x)\),其功能是通过多次单旋转使\(x\)成为树根。下面给出Splay树运算的步骤,其包括\(splay(x)\)的步骤:
1) \(splay(x)\):开始迭代过程,每轮迭代的步骤如下:
1.1) \(x\)无父亲:退出迭代;
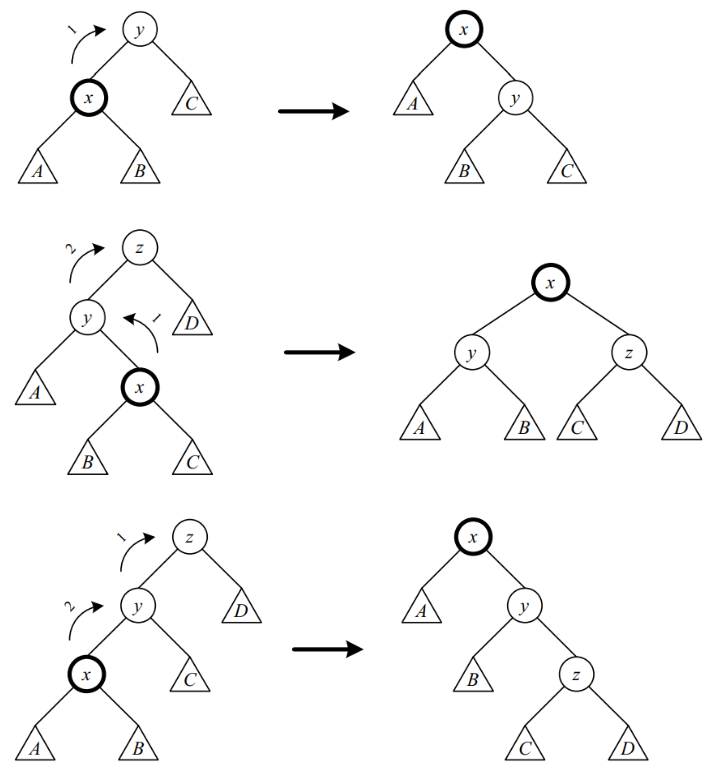
1.2) \(x\)有父亲无祖父:对\(x\)的父亲执行1次单旋转使\(x\)取代其父亲的位置(见上图第1张)。退出迭代;
1.3) \(x\)有祖父且\(x\)的父亲和祖父分别是左右节点或分别是右左节点:对\(x\)的父亲执行1次单旋转使\(x\)取代其父亲的位置。然后再对\(x\)此时的父亲执行1次单旋转使\(x\)取代其此时的父亲的位置(见上图第2张)。继续迭代;
1.4) \(x\)有祖父且\(x\)的父亲和祖父都是左节点或都是右节点:对\(x\)的祖父执行1次单旋转使\(x\)的父亲取代其祖父的位置。然后再对\(x\)此时的父亲执行1次单旋转使\(x\)取代其此时的父亲的位置(见上图第3张)。继续迭代;
2) \(insert(k)\):先执行BST的\(insert(k)\)得到新节点\(x\)(按之前讨论BST的文章中的步骤)。然后执行\(splay(x)\);
3) \(find(k)\):可根据BST的\(find\)改造得到(按之前讨论BST的文章中的步骤)。具体是在每轮迭代刚开始时就额外用\(x’\)记录当前节点,那么整个迭代结束时,无论是否查找成功,\(x’\)总表示整个迭代过程所访问到的最深节点,之后称其为\(find\)的最后访问节点。最后如果\(x’\)非空(显然仅当二叉树为空树时其为空)还必须额外执行\(splay(x’)\);
4) \(remove(k)\):先执行上述\(find(k)\)。若查找失败则退出,否则将查找成功得到的节点计为\(x\)。若\(x\)无孩子则置空树根。若\(x\)只有1个孩子则置树根为该孩子(并将该孩子的\(parent\)置空)。若\(x\)有2个孩子则初始化\(l,r\)分别指向\(x\)的左右孩子,置树根为\(l\)(并将\(l\)的\(parent\)置空),找到\(l\)子树的最右节点\(l’\),执行\(splay(l’)\),最后置\(l’.right=r\)(并将\(r\)的\(parent\)指向\(l’\));
至此已完成对Splay树的定义,需注意到Splay树完全不限制BST的形态,任何BST都能作为Splay树来执行上述运算,并且随着运算次数增加,二叉树的高度会逐步的“收敛”至\(O(\lg{n})\)。可以发现这种能让任何BST都逐步“恢复平衡”的性质十分特殊,大部分的传统自平衡树(红黑树、AVL树等)不仅不具备该特性,并且如果执行运算前不符合相应的形态等各方面的限制,还会产生各种难以预料的错误。总之Splay树的这个特性很重要,之后在分析Splay树的时间复杂度时会证明该特性。
SPLAY树的时间复杂度
首先给出之后会用到的辅助公式如下:
a1) 设\(a>0,b>0,c\geq a+b\),则\(\log_2{a}+\log_2{b}-2\log_2{c}\leq -2\);
证明:由于\(\log_2{x}\)的二阶导数恒小于0,所以其恒为上凸函数,根据上凸函数的定义有\(\log_2{a} + \log_2{b} \leq 2\log_2{(\frac{a+b}{2})}\)。于是有不等式\(\log_2{a}+\log_2{b}-2\log_2{c} \leq \log_2{a}+\log_2{b}-2\log_2{(a+b)} \leq 2\log_2{(\frac{a+b}{2})}-2\log_2{(a+b)}=-2\)。
定义\(s(x)\)为节点\(x\)与其所有后代节点的总数,\(r(x)=\log_2{s(x)}\)。进而可定义\(\Phi(T)=\sum_{x\in T}r(x)\),其中自变量\(T\)可以是任意的二叉树,求和符号\(\sum_{x\in T}\)表示对\(T\)的所有节点求和。显然\(\Phi(T)\geq 0\),并且仅当\(T\)的总节点数小于2时等号成立。接下来用势能法做摊还分析,其中的势能函数为\(\Phi\)。分析过程通过命题和对命题的证明来给出:
b1) 在节点数为\(n\geq 1\)的BST执行\(splay(x)\)。执行前后\(\Delta\Phi \leq 3\log_2{(n)}-H_x+1\),\(H_x\)是执行前\(x\)的高度;
证明:先分析某一轮迭代的势能变化\(\Delta\Phi’\),为方便用\(s,s’\)和\(r,r’\)分别表示该轮迭代前后的\(s\)和\(r\),然后分情况讨论:
1) 步骤(1.1):完全无影响,\(\Delta\Phi’=0\);
2) 步骤(1.2):以右旋转为例(见上图1),左旋转同理。设\(y\)是该轮迭代开始时\(x\)的父亲,该轮迭代前后仅\(x,y\)的后代数目改变,并且\(r'(x)=r(y)\)。故\(\Delta\Phi’=r'(y)+r'(x)-r(y)-r(x)=r'(y)-r(x)\leq (r'(x)-1)-r(x)\);
3) 步骤(1.3):以左右旋转为例(见上图2),右左旋转同理。设\(y,z\)是该轮迭代开始时\(x\)的父亲和祖父,则该轮迭代前后仅\(x,y,z\)的后代数目改变,并且\(r'(x)=r(z)\)。同理\(\Delta\Phi’=r'(y)+r'(z)-r(y)-r(x)<r'(y)+r'(z)-2r(x)\),将该式最右边变形可得\(\Delta\Phi’ < 2(r'(x)-r(x))+(r'(y)+r'(z)-2r'(x))\)。注意到\(s'(x)=s'(y)+s'(z)+1>s'(y)+s'(z)\),结合该式和前面的不等式和(a1)可得\(\Delta\Phi’ < 2(r'(x)-r(x))-2\);
4) 步骤(1.4):以右右旋转为例(见上图3),左左旋转同理。设\(y,z\)是该轮迭代开始时\(x\)的父亲和祖父,则该轮迭代前后仅\(x,y,z\)的后代数目改变,并且\(r'(x)=r(z)\)。同理\(\Delta\Phi’=r'(y)+r'(z)-r(y)-r(x)<r'(y)+r'(z)-2r(x)\),将该式额外放缩一次可得\(\Delta\Phi’ < r'(x)+r'(z)-2r(x)\),再对最右边变形可得\(\Delta\Phi’ < 3(r'(x)-r(x))+(r(x)+r'(z)-2r'(x))\)。注意到\(s'(x)=s(x)+s'(z)+1>s(x)+s'(z)\),结合该式和前面的不等式和(a1)可得\(\Delta\Phi’ < 3(r'(x)-r(x))-2\);
对于(2)(3)(4)情况,综上有\(\Delta\Phi’ < 3(r'(x)-r(x))-2\)。然后分析整个迭代过程的势能变化,首先最后一轮迭代只能是情况(1)(2),其他轮则只能是(3)(4)。设迭代总轮数为\(k\geq 1\),并将第\(i\)轮迭代后的\(r\)计为\(r^{(i)}\)(最初的\(r\)仍计为\(r\))。若\(k=1\)且这轮迭代是情况(1)则\(H_x=1,\Delta\Phi=0\)。若\(k=1\)且这轮迭代是情况(2)则\(H_x=2,\Delta\Phi < 3(r^{(1)}(x)-r(x))-2\leq 3r^{(1)}(x)-2\),这轮迭代结束时\(x\)成为树根,所以\(\Delta\Phi<3\log_2{(n)}-2=3\log_2{(n)}-H_x\)。若\(k>1\)且最后一轮迭代是情况(1)则\(\Delta\Phi\)由前\(k-1\)轮迭代决定,所以\(H_x=2(k-1)+1,\Delta\Phi< 3(r^{(k-1)}(x)-r(x))-2(k-1) \leq 3r^{(k-1)}(x)-2(k-1)\),第\(k-1\)轮迭代结束时\(x\)就已经成为树根,所以\(\Delta\Phi<3\log_2{(n)}-2(k-1)=3\log_2{(n)}-H_x+1\)。若\(k>1\)且最后一轮迭代是情况(2)则\(\Delta\Phi\)由所有轮迭代决定,所以\(H_x=2(k-1)+2,\Delta\Phi< 3(r^{(k)}(x)-r(x))-2k \leq 3r^{(k)}(x)-2k\),第\(k\)轮迭代结束时\(x\)成为树根,所以\(\Delta\Phi<3\log_2{(n)}-2k=3\log_2{(n)}-H_x\)。综合这4种情况有\(\Delta\Phi \leq 3\log_2{(n)}-H_x+1\)。
b2) 在节点数为\(n\geq 1\)的BST执行\(find\)。执行前后\(\Delta\Phi \leq 3\log_2{(n)}-H_x+1\),\(H_x\)是执行前最后访问节点\(x\)的高度;
证明:由于\(n\geq 1\),所以\(x\)存在且会执行\(splay(x)\),故\(\Delta\Phi\)为\(splay(x)\)造成的势能变化,结合(b1)可得上述结论。
b3) 在节点数为\(n\geq 1\)的BST执行\(insert\)。执行前后\(\Delta\Phi \leq 4\log_2{(n+1)}-H_x+1\),\(H_x\)是\(splay(x)\)前新节点\(x\)的高度;
证明:先分析BST插入前后的势能变化\(\Delta\Phi_1\)。在BST插入刚完成时设\(x\)有\(k\)个祖先,由于\(n\geq 1\)所以有\(k\geq 1\),然后将这些祖先“由近到远”计为\(x_1…x_k\)。BST插入前后二叉树多了个新节点,原节点仅\(x_1…x_k\)的后代总数目有变化,并且都是+1,如果约定函数\(s\)表示BST插入前的\(s\),则有\(\Delta\Phi_1=log_2{1}+\sum_{i=1}^k [\log_2{(s(x_i)+1)}-\log_2{(s(x_i)})]=\log_2(\prod_{i=1}^k\frac{s(x_i)+1}{s(x_i)})\)。注意到任意父子节点\(x_{i+1},x_i\)都满足\(s(x_{i+1})\geq s(x_i)+1\),所以有\(\Delta\Phi_1 \leq \log_2{[(\prod_{i=1}^{k-1}\frac{s(x_{i+1})}{s(x_i)})\frac{s(x_k)+1}{s(x_k)}]}=\log_2(\frac{s(x_k)+1}{s(x_1)})\)。注意到\(x_k\)即BST插入前的树根,所以有\(\Delta\Phi_1 \leq \log_2(\frac{n+1}{s(x_1)}) \leq \log_2{(n+1)}\)。BST插入结束后会执行\(splay(x)\),根据(b1)可直接得到该步骤导致的势能变化\(\Delta\Phi_2\leq 3\log_2{(n+1)}-H_x+1\)。综上有\(\Delta\Phi= \Delta\Phi_1+ \Delta\Phi_2=4\log_2{(n+1)}-H_x+1\)。
b4) 在节点数为\(n\geq 1\)的BST执行\(remove\)。若\(find\)子步骤结束后未再执行\(splay\),则执行前后有\(\Delta\Phi \leq 3\log_2{(n)}-H_{x}+1\)。若\(find\)子步骤之后还执行了\(splay(y)\),则有\(\Delta\Phi < 6\log_2{(n)}-H_{x}-H’_{y}+2\)。前面的\(H_x\)都是\(remove\)执行前\(find\)子步骤的最后访问节点\(x\)的高度,\(H’_y\)则是\(splay(y)\)执行前的\(y\)的高度;
证明:先将\(find\)子步骤导致的势能变化计为\(\Delta\Phi_1\),由于\(n\geq 1\)故\(x\)非空,根据(b1)有\(\Delta\Phi_1 \leq 3\log_2{(n)}-H_x+1\)。若\(find\)子步骤结束后未再执行\(splay\),则有\(\Delta\Phi \leq \Delta\Phi_1\),因为删除成功的情况并不增大势能。若\(find\)子步骤结束后执行了\(splay(y)\),则先回到\(find\)子步骤刚刚结束时,将此时的树根\(x\)的左右子树分别计为\(T_L\)与\(T_R\),将此时\(T_L\)的总节点数计为\(n_L\),则此时的总势能可表示为\(\Phi’=\Phi(T_L)+\log_2{n}+\Phi(T_R)\)。下一步是用\(T_L\)取代二叉树,此时总势能变为\(\Phi(T_L)\)。下一步是执行\(splay(y)\),根据(b1)此时的总势能不超过\(\Phi(T_L)+3\log_2{(n_L)}-H’_y+1 < \Phi(T_L)+3\log_2{(n)}-H’_y+1\)。最后一步是使\(T_R\)成为当前树根的右子树,此时总势能小于\(\Phi(T_L)+3\log_2{(n)}-H’_y+1+ [(\log_2{(n-1)}-\log_2{(n_L)}) +\Phi(T_R)]\),整理可得其减\(\Phi’\)的差小于\((\log_2{(n-1)}-\log_2{(n_L)}-\log_2{n})+3\log_2{(n)}-H’_y+1 \leq 3\log_2{(n)}-H’_y+1\),进而可得出总势能的变化量满足\(\Delta\Phi < \Delta\Phi_1+3\log_2{(n)}-H’_y+1\)。综合前面2种情况,上述命题成立。
根据上述命题可得到关于Splay树的摊还分析结论,这里通过命题和对命题的证明给出:
c1) 在节点数为\(n>0\)的BST执行\(m\)次\(find,insert,remove\)运算,其总代价有上界\(O(m\lg{(n+m)} + n\lg{n})\);
证明:根据\(find,insert,remove\)的步骤。若这3种运算执行前BST为空树,则其实际代价都为常数,其导致的势能变化量都是0,其中\(insert\)导致的变化量为\(\log_2{1}-0=0\)。若这3种运算执行前BST包含\(k\geq 1\)个节点,则\(find,insert\)的实际代价都是“\(c_1H_x+c_2\)”型的,\(remove\)的实际代价是“\(c_1(H_x+H’_y)+c_2\)”型的(没有执行\(splay(y)\)的话把\(H’_y\)当作0)。这表明在最开始定义势能函数时,就能找到合适的常数\(A>0\)用来将势能定义为\(A\Phi\),这样就存在常数\(B>0\)使3种运算在势能\(A\Phi\)下的摊还代价都小于\(6A\log_2{(k)} + B\),因为\(\Delta(A\Phi)\)中的\(-AH_x\)或\(-AH’_y\)足以将实际代价中关于\(H_x\)或\(H’_y\)的线性项抵扣到小于\(B\)。
注意到每次运算开始时的节点数都小于\(n+m\),所以总摊还代价小于\(6Am\log_2{(n+m)} + Bm\)。首次运算开始前BST有\(n\)个节点,显然此时的势能等于0或小于\(An\log_2(n)\), 而最后一次运算结束时的势能则至少为0,所以总摊还代价至多比总实际代价少\(An\log_2(n)\),于是总实际代价小于\(6Am\log_2{(n+m)} + Bm + An\log_2(n) = O(m\lg{(n+m)} + n\lg{(n)})\)。
c2) 在节点数为\(n>0\)的BST执行\(m\)次\(splay\)运算,其总代价有上界\(O(m\lg{n} + n\lg{n})\);
证明:与(c1)同理,将节点总数的上限从\(n+m\)改为\(n\)即可。
上述(c2)表明在Splay树上设计新运算时,如果能在该运算中加入额外的\(splay\)运算,并保证该运算的实际代价总能“等于”该运算中的\(splay\)的实际代价,则该运算的摊还代价就也可能等于\(O(\lg{n})\),不过这也跟该运算对势能的影响有关。
总结与实现
Splay树的运算步骤本身比较简单,其最复杂的部分反而是上述的摊还分析,不过这里仍要强调几个细节。首先注意到\(splay(x)\)的步骤(1.3)和(1.4)并不对称,其中的单旋转并不总作用于当前\(x\)的当前父亲。对于\(find\)运算则必须在BST查找的基础上额外加入确定\(x’\)以及\(splay(x’)\)的步骤。如果在实现Splay树时未注意到这些细节,最终的程序可能并不会出错,但却无法保证运算代价与上述的分析结果一致。最后给出Splay树的程序实现如下,其他未提到的细节见程序与注释。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 | class Node: def __init__(self, key): self.key = key self.parent = None self.left = None self.right = None class SplayTree: def __init__(self): self.root = None def _rightRotate(self, n): m = n.left n.left = m.right m.right = n if not n.parent: self.root = m elif n.parent.left is n: n.parent.left = m else: n.parent.right = m m.parent = n.parent n.parent = m if n.left: n.left.parent = n def _leftRotate(self, n): m = n.right n.right = m.left m.left = n if not n.parent: self.root = m elif n.parent.left is n: n.parent.left = m else: n.parent.right = m m.parent = n.parent n.parent = m if n.right: n.right.parent = n def _splay(self, n): while n.parent: if not n.parent.parent: if n is n.parent.left: self._rightRotate(n.parent) else: self._leftRotate(n.parent) else: if n.parent is n.parent.parent.left: if n is n.parent.left: self._rightRotate(n.parent.parent) self._rightRotate(n.parent) else: self._leftRotate(n.parent) self._rightRotate(n.parent) else: if n is n.parent.right: self._leftRotate(n.parent.parent) self._leftRotate(n.parent) else: self._rightRotate(n.parent) self._leftRotate(n.parent) def find(self, k): root, p = self.root, None while root: p = root # 记录整个迭代中的最后访问节点 if k == root.key: break elif k < root.key: root = root.left else: root = root.right if p: self._splay(p) return root def _bstInsert(self, k): if not self.root: self.root = Node(k) return self.root root = self.root while root: if k < root.key: if not root.left: root.left = Node(k) root.left.parent = root return root.left root = root.left else: if not root.right: root.right = Node(k) root.right.parent = root return root.right root = root.right def insert(self, k): self._splay(self._bstInsert(k)) return self.root def remove(self, k): node = self.find(k) if node: if not(node.left or node.right): self.root = None elif not(node.left and node.right): self.root = (node.left or node.right) self.root.parent = None else: l, r = node.left, node.right self.root = l self.root.parent = None mostRight = self.root while mostRight.right: mostRight = mostRight.right self._splay(mostRight) self.root.right = r self.root.right.parent = self.root return node |